|
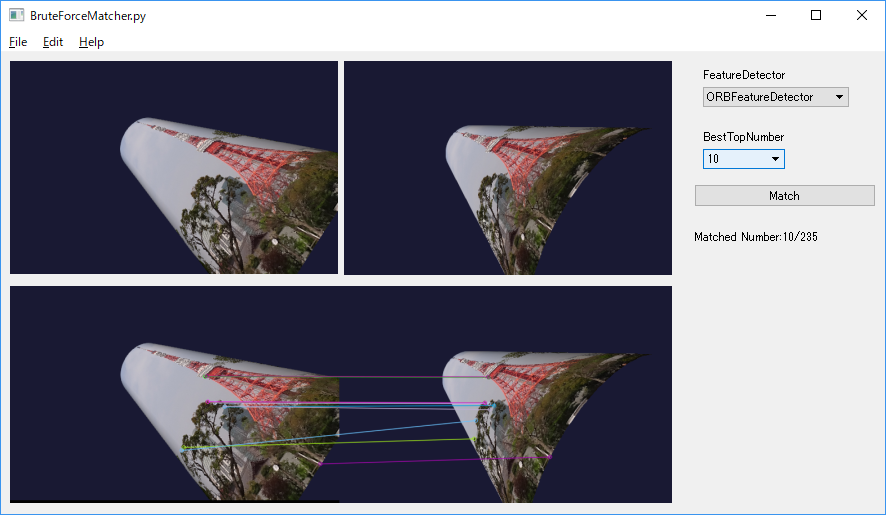
SOL4Py Sample: BruteForceMatcher
|
#******************************************************************************
#
# Copyright (c) 2018-2019 Antillia.com TOSHIYUKI ARAI. ALL RIGHTS RESERVED.
#
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU General Public License as published by
# the Free Software Foundation, either version 3 of the License, or
# (at your option) any later version.
#
# This program is distributed in the hope that it will be useful,
# but WITHOUT ANY WARRANTY; without even the implied warranty of
# MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
# GNU General Public License for more details.
#
# You should have received a copy of the GNU General Public License
# along with this program. If not, see <http://www.gnu.org/licenses/>.
#
#******************************************************************************
# BruteForceMatcher.py
# See for detail: https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_feature2d/py_matcher/py_matcher.html
# encodig: utf-8
import sys
import os
import cv2
import traceback
import numpy as np
from PyQt5.QtCore import *
from PyQt5.QtWidgets import *
from PyQt5.QtGui import *
#
sys.path.append('../')
from SOL4Py.ZApplicationView import *
from SOL4Py.ZLabeledComboBox import ZLabeledComboBox
from SOL4Py.ZLabeledSlider import ZLabeledSlider
from SOL4Py.opencv.ZOpenCVImageView import ZOpenCVImageView
from SOL4Py.ZVerticalPane import ZVerticalPane
from SOL4Py.ZHorizontalLayouter import ZHorizontalLayouter
class MainView(ZApplicationView):
FIRST = 0
SECOND = 1
THIRD = 2
DETECTOR_AKAZE = 0
DETECTOR_BRISK = 1
DETECTOR_ORB = 2
SOURCE_IMAGES = 2
# MainView Construsctor
def __init__(self, title, x, y, width, height):
super(MainView, self).__init__(title, x, y, width, height)
self.filenames = ["../images/Tower1.png", "../images/Tower2.png", "../images/Blank.png"]
self.grid = ZGridLayouter(self)
self.image_views = [None, None, None]
flags = cv2.IMREAD_COLOR
# Create three imageviews.
self.image_views[self.FIRST] = ZOpenCVImageView(self.grid, self.filenames[self.FIRST], flags)
self.image_views[self.SECOND] = ZOpenCVImageView(self.grid, self.filenames[self.SECOND], flags)
self.image_views[self.THIRD] = ZOpenCVImageView(self.grid, self.filenames[self.THIRD], flags)
self.grid.add(self.image_views[self.FIRST], 0, 0)
self.grid.add(self.image_views[self.SECOND], 0, 1)
self.grid.add(self.image_views[self.THIRD], 1, 0, 1, 2)
self.detector_id = self.DETECTOR_AKAZE
self.detector= None
self.show()
# Redefined add_file_menu.
def add_file_menu(self):
# Typical file menu
self.file_menu = QMenu('&File', self)
self.file_menu.addAction('&New', self.file_new)
self.file_menu.addAction('&Open First File', self.first_file_open)
self.file_menu.addAction('&Open Second File', self.second_file_open)
self.file_menu.addAction('&Save', self.file_save)
self.file_menu.addAction('&Save As', self.file_save_as)
self.file_menu.addAction('&Quit', self.file_quit)
self.menuBar().addMenu(self.file_menu)
# Add control pane to MainView
def add_control_pane(self, fixed_width=200):
# Control pane widget
self.vpane = ZVerticalPane(self, fixed_width)
# 1 Stitcher detector selection combobox
self.detectors = {"AKAZEFeatureDetector" : self.DETECTOR_AKAZE,
"BRISKFeatureDetector" : self.DETECTOR_BRISK,
"ORBFeatureDetector" : self.DETECTOR_ORB}
self.detector_id = self.DETECTOR_AKAZE
self.detector_combobox = ZLabeledComboBox(self.vpane, "FeatureDetector")
self.detector_combobox.add_activated_callback(self.detector_changed)
self.detector_combobox.add_items(self.detectors.keys())
self.detector_combobox.set_current_text(self.detector_id)
self.best_top = {"10" : 10, "20" : 20, "30" : 30, "40" : 40,
"50" : 50, "60" : 60, "70" : 70, "80" : 80,
"90" : 90, "100": 100}
self.best_top_value = 10
self.best_top_combobox = ZLabeledComboBox(self.vpane, "BestTopNumber")
self.best_top_combobox.add_activated_callback(self.best_top_changed)
self.best_top_combobox.add_items(self.best_top.keys())
self.best_top_combobox.set_current_text(0)
# Match pushbutton
self.match_button = QPushButton("Match", self.vpane)
self.match_button.clicked.connect(self.match_button_clicked)
self.spacer = QLabel("", self.vpane)
self.matched_number = QLabel("", self.vpane)
self.vpane.add(self.detector_combobox)
self.vpane.add(self.best_top_combobox)
self.vpane.add(self.match_button)
self.vpane.add(self.spacer)
self.vpane.add(self.matched_number)
self.set_right_dock(self.vpane)
def first_file_open(self):
options = QFileDialog.Options()
self.filenames[self.FIRST], _ = QFileDialog.getOpenFileName(self,"FileOpenDialog", "",
"All Files (*);;Image Files (*.png;*jpg;*.jpeg)", options=options)
if self.filenames[self.FIRST]:
self.image_views[self.FIRST].load_opencv_image(self.filenames[self.FIRST], cv2.IMREAD_COLOR)
filename = self.filenames[self.FIRST] + " " + self.filenames[self.SECOND]
self.set_filenamed_title(filename)
def second_file_open(self):
options = QFileDialog.Options()
self.filenames[self.SECOND], _ = QFileDialog.getOpenFileName(self,"FileOpenDialog", "",
"All Files (*);;Image Files (*.png;*jpg;*.jpeg)", options=options)
if self.filenames[self.SECOND]:
self.image_views[self.SECOND].load_opencv_image(self.filenames[self.SECOND], cv2.IMREAD_COLOR)
filename = self.filenames[self.FIRST] + " " + self.filenames[self.SECOND]
self.set_filenamed_title(filename)
# Detector Combobox changed callback.
def detector_changed(self, text):
self.detector_id = self.detectors[text]
self.feature_matching()
# Best_top Combobox changed callback.
def best_top_changed(self, text):
self.best_top_value = int(text)
print("Best top value {}".format(self.best_top_value))
self.matched_number
self.feature_matching()
# Match button clicked callback
def match_button_clicked(self):
self.feature_matching()
# Feature matching operation.
def feature_matching(self):
try:
self.detector = None
# 1 Create a feature detector by self.detector_id.
if self.detector_id == self.DETECTOR_AKAZE:
self.detector = cv2.AKAZE_create()
if self.detector_id == self. DETECTOR_BRISK:
self.detector = cv2.BRISK_create()
if self.detector_id == self.DETECTOR_ORB:
self.detector = cv2.ORB_create()
self.keypoints = [None, None]
self.descriptors = [None, None]
self.images = [None, None]
# 2 Call dector.detectAndCompute
for i in range(self.SOURCE_IMAGES):
self.images[i] = self.image_views[i ].get_opencv_image()
self.keypoints[i], self.descriptors[i] = self.detector.detectAndCompute(self.images[i], None)
# 3 Create Brute-Force Matcher object.
bf_matcher = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
# 4 Match two descriptors by using bf_matcher.
matches = bf_matcher.match(self.descriptors[self.FIRST], self.descriptors[self.SECOND])
# 5 Update matche_number label.
self.total_matched_number = len(matches)
label = "Matched Number:" + str(self.best_top_value) + "/" + str(self.total_matched_number)
self.matched_number.setText(label)
print("matched number {}".format(len(matches)))
# 6 Sort matches by distance.
matches = sorted(matches, key=lambda x:x.distance)
# 7 Call cv2.drawMatches.
out_image = self.images[self.FIRST]
matched_image = cv2.drawMatches(self.images[self.FIRST], self.keypoints[self.FIRST],
self.images[self.SECOND], self.keypoints[self.SECOND],
matches[:self.best_top_value], out_image, flags=2)
# 8 Set matched_image to the THIRD image_view
self.image_views[self.THIRD].set_opencv_image(matched_image);
self.image_views[self.THIRD].update()
except:
traceback.print_exc()
#*************************************************
#
if main(__name__):
try:
app_name = os.path.basename(sys.argv[0])
applet = QApplication(sys.argv)
main_view = MainView(app_name, 40, 40, 900, 380)
main_view.show ()
applet.exec_()
except:
traceback.print_exc()
Last modified: 22 Mar. 2019